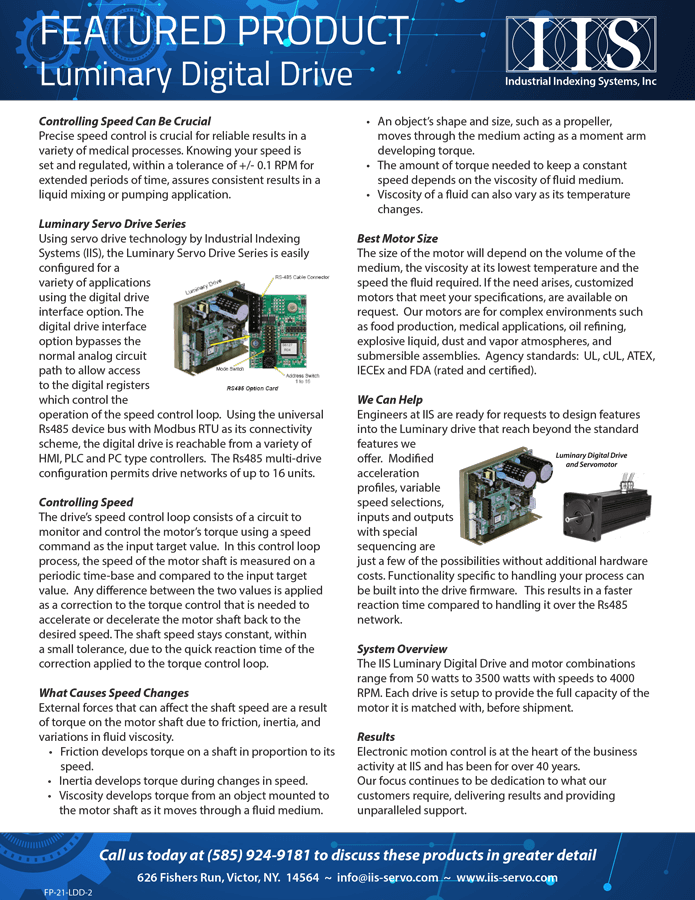
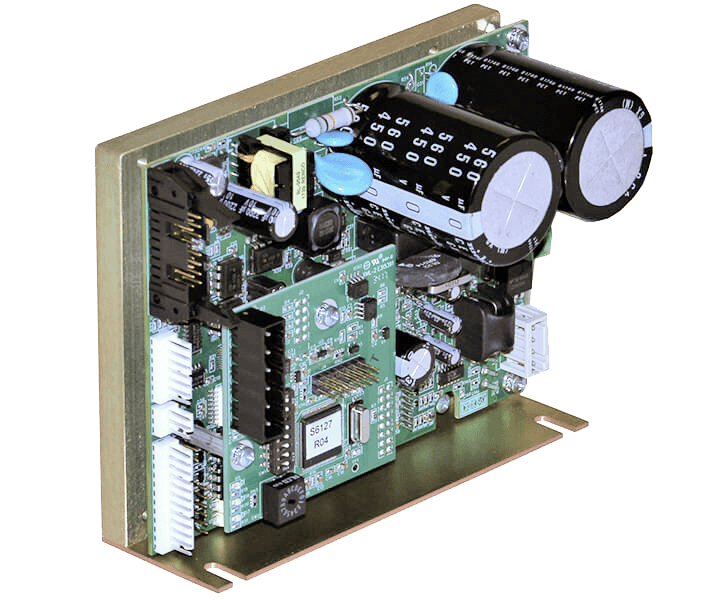
Luminary Series Servo Drives provide the OEM market with a low cost but high performance servo drive for use in applications such as x-y tables, actuators, roll feeders, or any requirement where true position, velocity and torque control are desired. The Luminary Series is a cost competitive alternative to stepper control systems.
LD-500 & LD-101 Drive Features
- Two Drive Sizes: 5.0 amp and 10.0 amp rms continuous at 45°C
- Integral Power Supply – Line input voltage range: 100 – 240vac
- +/- 10v analog control input with sinusoidal drive output for smooth torque and velocity control
- Option card interface for customized OEM digital drive communications
- Four optically isolated 24vdc digital inputs
- Two optically isolated 24vdc digital outputs
- Motor encoder input, 5vdc, quadrature, ABZ/UVW
- Repeater output of encoder feedback for interfacing to an analog position controller
- Easy setup for your motor and drive configuration
- Optional: ISOCOMM1 – Factory communication interface for updating firmware and motor parameters
The versatile Luminary drives, LD-500 and the LD-101, are digitally controlled and will drive low cost servomotors up to 3000 watts. A standard analog input interface with encoder feedback provide the basic needs of a servomotor drive system. Input selectable velocity or torque mode provides real-time dynamic control.
Optional adaptor cards can piggy-back onto the drive to provide various standard or custom digital control schemes. Currently the IIS drive network option card is available for multi-axis connectivity using the LMC-400 controller.
A development port connector, for access by the OEM, uses the ISOCOMM1 interface adapter. The ISOCOMM1 provides an isolated RS-232 connection to your PC.
Easy to use PC based L-Drive software for commissioning the system, available at no extra cost, is used for setting up motor/ drive parameters and tuning the motor response to the load. Once set, the configuration firmware resides on the board giving the board the correct personality for the motor it will drive.
Motor/Drive Specifications
Selecting the proper motor and drive combination for a motion control application depends on the analysis of the load that is to be driven by its performance goal. A performance goal requires specifics of how far, how fast, and how often a given load needs to move. Motion analysis determines the peak and rated horsepower a motor and drive combination needs to produce to perform as required. The proper definition of the load and the actuator design should be as accurate as possible.
With the actuator size and the size of the load defined, the optimum performance will also determine the proper gearing between the motor and the load needed to achieve the goal. Gearing selection is a trade-off between speed and torque at the given horsepower. Varying a belt pulley ratio, leadscrew pitch, roll feed diameter, and/or gearbox ratio in the actuator design are examples of the gearing analysis that allows the designer to select the motor and drive combination that gives optimum system performance.
Optimum performance can be a tradeoff between system cost and initial goals. Industrial Indexing Systems, works with our customers to achieve those goals and guarantees an agreed-upon performance standard.
Motor Standards
Our motors are for complex environments such as food production, medical applications, oil refining, explosive liquid, dust and vapor atmospheres, and submersible assemblies. Agency standards: UL, cUL, ATEX, IECEx and FDA (rated and certified).
Downloads/Resources
View Luminary Drive Manual (PDF)>
Emerald/EMax/Luminary Motion S/W>
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Luminary Series:
Luminary Motion Controllers>
Multi-Axis Servo Capability
list of control capabilities into a low-cost hardware platform.
Luminary Stepper Motors and Drives>
Flexible design options needed by the OEM
Designed with the OEM in mind, the Luminary Series Stepper drive packs a full complement of interface options.